Please vote for the brilliant Dr. Maria Tomas, Senior lecturer in SMCSE, @CityUniLondon for the 2019 British Photography Awards in the category of Documentary! Please vote here -> https://www.
Please vote for the brilliant Dr. Maria Tomas, Senior lecturer in SMCSE, @CityUniLondon for the 2019 British Photography Awards in the category of Documentary! Please vote here -> https://www.
https://www.popsci.com/why-do-we-think-tiny-things-are-cute

What would inspire someone to painstakingly craft an inch-and-a-half-long burrito using dental tools? A hamster, of course. In the viral YouTube video “Tiny Hamster Eating Tiny Burritos,” a man prepares a chicken and single black bean burrito, then serves it to the rodent waiting at a jam-jar table. The diner pulls the burrito off a poker-chip plate and stuffs the entire thing into its mouth, cheeks puffed as if in satisfaction. It’s amazing.
Videos like this are shared all over the internet, with miniature birthday celebrations, romantic dates, and tiki parties starring cherubic animals in unlikely situations. The clips have accumulated millions of views. So why do we find these tiny tableaus so satisfying? In part, it’s because we’re engineered to appreciate the smaller things in life.
The protagonist is typically a small animal with a big head and big eyes, features collectively known as “baby schema”—a phrase coined in a 1943 paper by Austrian ethologist Konrad Lorenz. Human infants are the prototypical embodiment of baby schema. Because our babies are so helpless, Lorenz proposed, we evolved to find these characteristics cute so we’ll instinctually want to take care of them. This response helps our species survive. In fact, the power of baby schema is so strong, we’re even attracted to other beings with these traits.
“We’re not robots or computers,” says Adrian David Cheok, director of the Imagineering Institute in Malaysia, who has studied Kawaii, a culture prevalent in Japan that celebrates the adorable side of life. “Not only do we find other people’s children cute, we also find other animals cute, like puppies or kittens, because they have similar features to human babies.”
Research bears this out. Dozens of studies show that the smaller and more stereotypically “baby” a human or animal looks, the more we want to protect it. One investigation found that seeing pictures of baby animals makes us smile, while another discovered that photos of human infants trigger the nucleus accumbens, a brain region implicated in the anticipation of a reward. There’s even evidence that cute things help us concentrate and perform tasks better, theoretically because they sharpen the focus of our attention on the recipients of our care.
Our response to baby schema is so strong that it also spills out toward inanimate objects. In a 2011 study, researchers tweaked images of cars to make them embody the baby schema, with huge headlights and smaller grilles to reflect infants’ big eyes and small noses. College students smiled more at pictures of the baby-faced autos, finding them more appealing than the unaltered versions.
Mimicking chubby-cheeked critters to make goods more attractive might help sell cars, but not all little creatures have features manufacturers should imitate. Some small animals don’t exactly inspire our cuddle reflex—who wants to caress a cockroach? That’s partly because these beasties display traits (bitty heads, large bodies, and beady eyes) that don’t fit the baby schema. Sure, some people have a soft spot for “ugly cute” animals, including some species of spiders, but these still fall on Lorenz’s spectrum with big, bright peepers.
It makes sense then that the original meaning of “cute” was “clever or shrewd.” Simply put, we appreciate the craftsmanship of small things—it’s more difficult to make a burrito the size of a thumb than one as big as your forearm. A man examining his finished creation for flaws with a dentist’s mirror definitely meets that innovative criteria.
These tiny, carefully made items may also bring us joy because they make us want to play. Psychologists Gary Sherman and Jonathan Haidt theorize that cuteness triggers not just a protective impulse, but also a childlike response that encourages fun. To them, the desire to engage with cute things stems from our need to socialize children through play—an urge we transfer to adorable objects.
Craftsmanship and playfulness definitely factor in to why we find pint-size things so charming, but don’t discount the huge impact of their petite proportions. Miniature scenes make us feel powerful as viewers. Anthropologist Claude Lévi-Strauss suggests in The Savage Mind that we derive satisfaction from minuscule objects because we can see and comprehend them in their entirety, which makes them less threatening. Essentially, tiny towns, toy soldiers, and miniature tea sets make us feel like gods…or Godzillas.
That power, of course, is all in your head. The reason you smile as you build a ship in a bottle or watch videos like “Tiny Birthday for a Tiny Hedgehog” (Look it up. You’re welcome.) is that your brain is taking in the sight of that carefully frosted cake and small spiky body topped with a party hat and sending you mental rewards, causing you to feel formidable, focused, happy, and capable of keeping the weak and vulnerable alive. Yes, it means we are easily dominated by diminutive things, but so what? They’re adorable.

http://www.govtech.com/question-of-the-day/Question-of-the-Day-for-10262018.html
You can’t smell the food in that review you’re reading on Yelp, but one day you might be able to.
Researchers at the Imagineering Institute in Malaysia are working on creating “digital smell.” One day they want users to be able to smell what they’re seeing when they use their digital devices. Right now, though, the process involves putting a cable up the user’s nose in order to stimulate certain neurons in the nasal passage.
In order to get people to think they were smelling something, the research team needed to deliver electric currents to the olfactory epithelium cells about 7 centimeters above and behind the nostrils. Most of the volunteers reported fragrant or chemical smells, although some also reported fruity, sweet, toasted minty, and woody odors.
The next step is to find a less invasive way to administer the electricity, such as a much smaller cable or by skipping the nose entirely and stimulating the brain instead.

Una delle cose più frustranti di navigare su internet è che gli unici sensi coinvolti sono la vista e l’udito. Spesso però è un vero peccato che il tatto, l’olfatto e il gusto vengano esclusi dal flusso di informazioni digitali da cui siamo raggiunti. Anche questi sensi sono collegati alle emozioni e ai ricordi e contribuiscono a formare la nostra esperienza del mondo — senza contare che la loro inclusione nell’esperienza digitale aprirebbe una grande quantità di applicazioni, da quelle legate al mondo del cibo, fino a quello del sesso virtuale e, sopratutto, potrebbe concedere agli amanti che non hanno la possibilità di vedersi dal vivo di sentirsi più vicini.
Kasun Karunanayaka dell’Imagineering Institute in Malesia sta lavorando alla riproduzione digitale del senso dell’olfatto. Karunanayaka collabora con uno dei ricercatori più importanti in questo campo, Adrian Cheok che dirige l’Imagineering Institute — intervistato già in passato da Motherboard riguardo il suo lavoro per creare un “Internet multisensoriale” — e con la startup giapponese Scentee per realizzare un’app che aggiunge odori alle funzioni dello smartphone. Grazie alla tecnologia che ha elaborato, le persone con disturbi olfattivi potrebbero riacquistare alcune funzioni olfattive, oppure sperimentare esperienze in VR integrate con tecnologie di stimolazione cerebrale per fornire agli utenti un’esperienza sensoriale più ricca.
Uno dei suoi ultimi esperimenti ha l’obiettivo di riprodurre gli odori senza passare attraverso la stimolazione chimica delle cellule olfattive. Il suo team ha creato uno strumento che sfrutta gli stimoli elettrici. Mettendo a contatto degli elettrodi con le cellule dell’epitelio olfattivo che inviano informazioni dal nervo olfattivo al cervello e modificando la quantità e la frequenza degli stimoli elettrici, il suo team è riuscito a riprodurre una serie di sensazioni olfattive. L’obiettivo della sperimentazione è quello di arrivare in futuro a riprodurre gli stimoli raggiungendo direttamente il cervello, senza ficcare un tubo su per il naso della gente, dato che molti dei volontari che hanno partecipato ai test non riuscivano a sopportarlo. Ne ho parlato direttamente con Karunanayaka via mail.
Motherboard: Come funziona la stimolazione elettrica delle cellule nasali?
Kasun Karunanayaka: Lo scopo del nostro studio era stimolare elettricamente l’epitelio olfattivo umano e descrivere le sensazioni corrispondenti. La stimolazione elettrica può provocare la depolarizzazione nelle cellule nervose e quindi con un’ampiezza di depolarizzazione sufficiente può indurre delle sensazioni o delle reazioni. Si può affermare che la stimolazione elettrica dei recettori olfattivi può riprodurre alcune sensazioni olfattive allo stesso modo in cui può produrre sensazioni gustative (nella pratica nota come elettrogustometria.)
Cosa si intende per depolarizzazione? Su quali meccanismi biologici si basa il vostro studio?
Il naso umano è parte del sistema chemiosensoriale, che aiuta a discriminare una vasta gamma di odori e sapori. Quando le molecole odorose entrano nell’epitelio olfattivo, si legano ai recettori olfattivi. Poi, i recettori olfattivi innescano una serie di segnali all’interno delle cellule che si traducono nell’apertura e chiusura dei canali ionici. Questo aumenta la concentrazione di ioni positivi all’interno delle cellule olfattive (un effetto noto come depolarizzazione). Questo effetto fa sì che le cellule olfattive rilascino pacchetti di segnali chimici chiamati neurotrasmettitori, che danno vita a un impulso nervoso.

Cosa avete capito grazie al vostro studio?
Su circa un quarto dei partecipanti dei 31 partecipanti ai nostri test, le combinazioni di stimoli da 1 mA e 70 Hz e quella da 1 mA e 10 Hz hanno prodotto sensazioni olfattive di odori profumati, dolci e che risultavano chimici. I partecipanti hanno riferito invece di aver provato intense sensazioni di dolore e formicolio per le combinazioni di 1 mA e 180 Hz o 4 mA e 70 Hz. Una piccola parte di loro ha riferito di avere sperimentato dei flash visivi con una stimolazione di 4 mA e 70 Hz. Crediamo che questo tipo di risultati suggeriscono che ci può essere un percorso elettrico per riprodurre il senso dell’olfatto negli esseri umani.
Abbiamo in programma di estendere questo esperimento a un numero maggiore di partecipanti e continuare a lavorare con quelli che hanno già segnalato delle sensazioni olfattive. Vogliamo sottoporli a diversi parametri di stimolazione elettrica, modificando la frequenza, la corrente e il periodo di stimolazione. Prevediamo così di identificare vari modelli di stimolazione che possono riprodurre in modo efficace diverse sensazioni olfattive. Il passo successivo sarebbe quello di confrontare la differenza tra la percezione degli odori elettrici e la percezione degli odori naturali, studiando le parti del cervello che vengono attivate dalle stimolazioni corrispondenti. Se entrambe le tecniche di stimolazione dovessero attivare approssimativamente le stesse aree del cervello, potremmo sostenere che la stimolazione elettrica può riprodurre le stesse sensazioni olfattive che hanno una base chimica.
Come funzionavano gli strumenti che avete sviluppato in precedenza?
Questo è il primo dispositivo per riprodurre le sensazioni olfattive con stimoli elettrici che abbiamo realizzato ed è parte di un progetto di ricerca a lungo termine per riprodurre sensazioni di gusto e olfatto attraverso la realtà aumentata. Nel 2011, abbiamo presentato per la prima volta una tecnologia digitale per riprodurre i sapori attraverso la stimolazione elettrica. Abbiamo presentato di recente un’altra tecnologia per riprodurre i sapori che utilizza invece la stimolazione termica alla conferenza IEEE VR 2018. Invece, nel 2016, abbiamo proposto per la prima volta l’idea di riprodurre le sensazioni olfattive utilizzando la stimolazione elettrica. Successivamente, nel 2017 abbiamo sviluppato un Olfactometer da laboratorio — un sistema di emissione degli odori computerizzato su base chimica. Inoltre, abbiamo collaborato con Scentee.
A cosa state lavorando con Scentee?
Scentee è il primo device compatibile con mobile al mondo che riproduce gli odori. Si inserisce nel jack audio degli iPhone o dei dispositivi Android e può riprodurre odori o fragranze utilizzando applicazioni per smartphone. Il profumo viene rilasciato attraverso un motore a ultrasuoni che ha un serbatoio rimovibile. Il dispositivo può riprodurre solo un aroma alla volta. Il rilascio dell’aroma viene attivato attraverso un’input sul touchscreen, un messaggio di testo in arrivo o una notifica sui social network. Inoltre, può essere utilizzato in varie applicazioni come l’allarme della sveglia o per l’aromaterapia.
Come vedete il futuro di questo tipo di tecnologie? Con quale formato verrano trasferiti i dati?
Oggi le applicazioni di realtà aumentata si basano principalmente sull’audio e sul video ma la digitalizzazione del tatto e del gusto è già stata realizzata sperimentalmente a livello di ricerca e diventerà uno standard in futuro. Con la digitalizzazione dell’olfatto, potremo sperimentare digitalmente cinque sensi di base in realtà aumentata e l’esperienza utente diventerà più completa. Questo creerà più applicazioni e opportunità in campi come l’interazione umana con il computer, i videogiochi, la medicina e l’e-commerce.
Per quanto riguarda i dati che verranno trasferiti in formato digitale, nel caso di esperienze di tipo continuo, dovremmo trasmettere un flusso di dati digitali come facciamo per l’audio e il video. Tuttavia, la gamma dei valori e la struttura dei dati potrà essere definita solo dopo aver trovato i corretti parametri di stimolazione per riprodurre ogni sensazione olfattiva.

The idea of having a real-time change in smell during immersive experiences watching movies isn’t new. We can trace such an attempt into 1959 where a technology called AromaRama was used to send across smells across to the audience.
The benefit is increased engagement as people would get the smell of flowers when a scene revolves around a garden or have the scent of smoke during sequences that pertain to it like wars or bomb explosions. Needless to say, the technology didn’t gain much traction.
In 2018, we are capable of a much efficient method that could get us the same results. The researchers at the Imagineering Institute in Malaysia have found a new method that could help a person smell an occasion, and they plan to use it in AR and VR based applications.
Imagine where you could get a sense of smell through mixed reality experiences. The researchers are calling this Digital Smell. Currently, the researchers have managed to do this by bringing in thin electrodes in contact with the inner lining of the human nose.
Yes, the current version requires two wires to be inserted into your nostrils.
That said the researchers are working on creating a smaller form factor of this technology so that it can be easily carried and used. The idea for such an invention comes from Kasun Karunanayaka, who went on with this innovation as a project to acquiring his Ph.D. with Adrian Cheok, who is now serving as the director of the institute.
He is also gunning for similar innovation, as his dream is to create a multisensory internet.
The first version of the project involved chemical cartridges that mix and release chemicals to produce odors. But this was not what the team wanted moving forwards. They wanted to create a system that can produce scent through electricity alone.
The team also collaborates with a Japanese startup called Scentee to develop a smartphone gadget that can produce smells based on user inputs.
To create an all-electric system, the team experimented with exciting the human neurons. The test requires a wire to be inserted into their nose. When the exposed silver tip touches the olfactory epithelium, which is located approximately 3 inches into the nasal cavity, the researchers will send an electric charge into them.
“We’ll see which areas in the brain are activated in each condition, and then compare the two patterns of activity,” Karunanayaka said. “Are they activating the same areas of the brain?” If so, that brain region could become the target for future research.”
The researchers varied both amperage and frequency of the current to see the smell sensations that they would create. For certain electric combinations, the perceived smells were off fruity or chemical in nature.

In the future, we could huff food blogs and snort stinky Twitter feeds straight into our sinuses.
Okay, I’ll admit that’s a highly exaggerated interpretation of new research by Kasun Karunanayaka, a senior research fellow at the Imagineering Institute in Malaysia, and his team. They’ve designed a concept for smelling digital content—like restaurant menu items or a florist’s rose bouquet—using electrical stimulation directly up your nostrils.
We’ve seen high-tech prototypes in the world of multisensory technology before: From molecule mixes that evoke the smell of New York in virtual reality, to “programmable” scent cartridges released during a movie, to gas masks for smelling sex while watching porn in VR. But most of these involve a chemical mix to make the scent. Instead of physical scent-mixing, Karunanayaka’s smellable internet involves sticking electrodes up your nose, to touch and stimulate neurons deep inside your nasal passages.
By varying the amount and frequency of the electrical currents, the researchers were able to evoke smells that weren’t there—but what test subjects actually perceived varied quite a bit, from person to person. Some described the smells as fruity, sweet, toasted minty, or woody, Karunanayaka told IEEE Spectrum. Others found the experiment so uncomfortable that they quit the trial after one session.
Shoving electrodes deep into nasal passages is obviously not the most user-friendly way to transmit digital smells, but the research team hopes to make the electrodes smaller and more flexible, or stimulate the brain directly, no invasive nose-cords required.

BY John Biggs
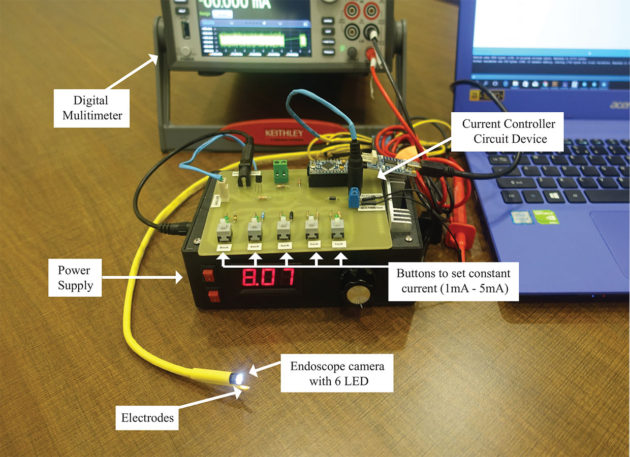
The IEEE has showcased one of the coolest research projects I’ve seen this month: virtual smells. By stimulating your olfactory nerve with a system that looks like one of those old-fashioned kids electronics kits, they’ve been able to simulate smells.
The project is pretty gross. To simulate a smell, the researchers are sticking leads far up into the nose and connecting them directly to the nerves. Senior research fellow at the Imagineering Institute in Malaysia, Kasun Karunanayaka, wanted to create a “multisensory Internet” with his Ph.D. student, Adrian Cheok. Cheok is Internet famous for sending electronic hugs to chickens and creating the first digital kisses.
The researchers brought in dozens of subjects and stuck long tubes up their noses in an effort to stimulate the olfactory bulb. By changing the intensity and frequency of the signals, they got some interesting results.
The subjects most often perceived odors they described as fragrant or chemical. Some people also reported smells that they described as fruity, sweet, toasted minty, or woody.
The biggest question, however, is whether he can find a way to produce these ghostly aromas without sticking a tube up people’s noses. The experiments were very uncomfortable for most of the volunteers, Karunanayaka admits: “A lot of people wanted to participate, but after one trial they left, because they couldn’t bear it.”
While I doubt we’ll all be wearing smell-o-vision tubes up our noses any time soon, this idea is fascinating. It could, for example, help people with paralyzed senses smell again, a proposition that definitely doesn’t stink.
![]()
By Eliza Strickland, 17 Oct 2018
Imagine a virtual reality movie about the Civil War where you can smell the smoke from the soldiers’ rifles. Or an online dating site where the profiles are scented with perfume or cologne. Or an augmented reality app that lets you point your phone at a restaurant menu and sample the aroma of each dish.
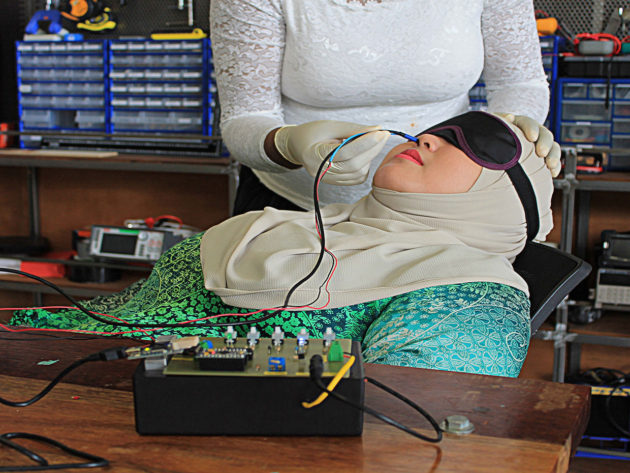
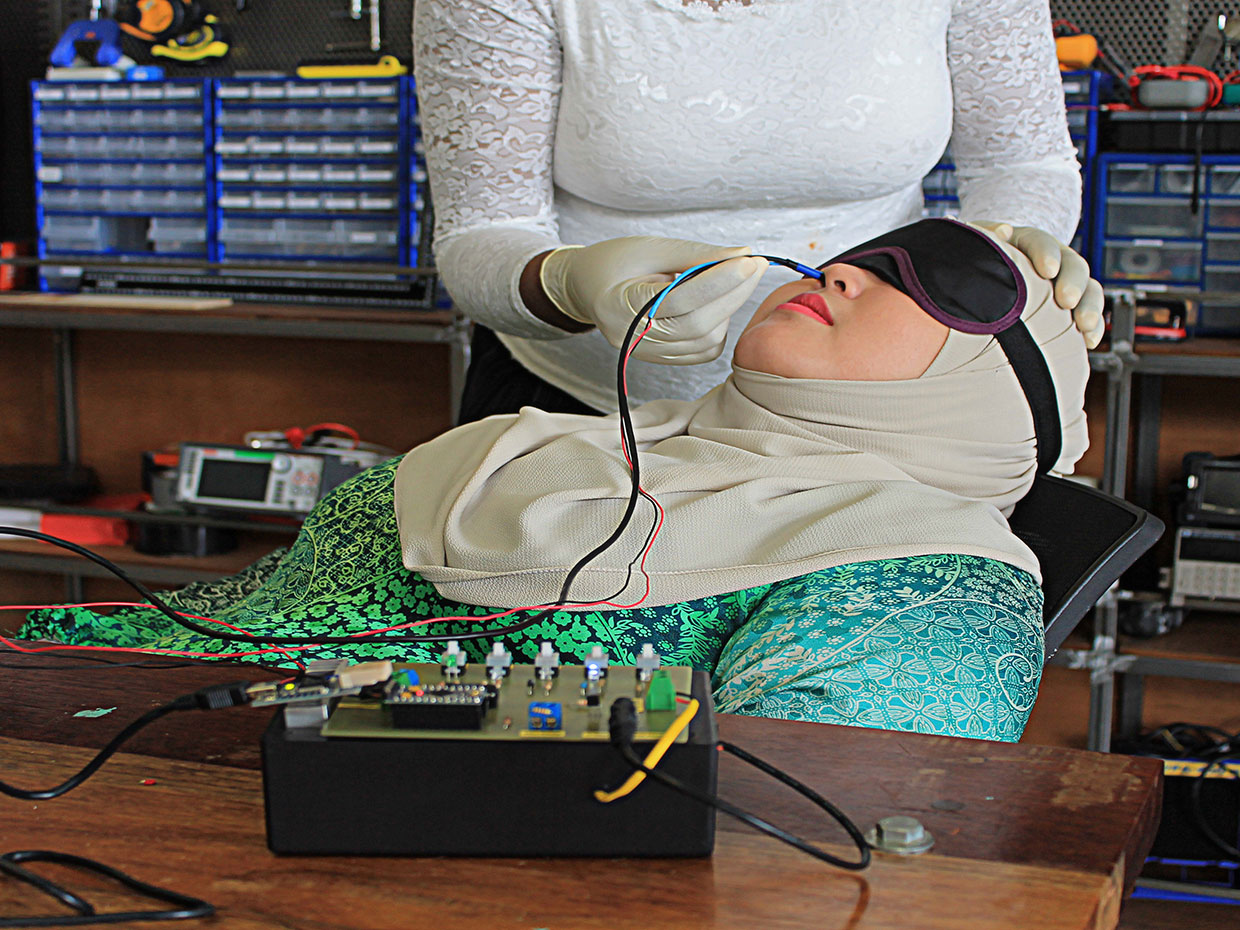
The researchers who are working on “digital smell” are still a very long way from such applications—in part because their technology’s form factor leaves something to be desired. Right now, catching a whiff of the future means sticking a cable up your nose, so electrodes can make contact with neurons deep in the nasal passages. But they’ve got some ideas for improvements.
This digital smell research is led by Kasun Karunanayaka, a senior research fellow at the Imagineering Institute in Malaysia. He started the project as a Ph.D. student with Adrian Cheok, now director of the institute and a professor at the City University of London, who’s on a quest to create a “multisensory Internet.” In one of Cheok’s earliest projects he sent hugs to chickens, and his students have also worked with digital kisses and electric taste.
Karunanayaka says most prior experiments with digital smell have involved chemical cartridges in devices that attach to computers or phones; sending a command to the device triggers the release of substances, which mix together to produce an odor.
Working in that chemical realm, Karunanayaka’s team is collaborating with a Japanese startup called Scentee that he says is developing “the world’s first smartphone gadget that can produce smell sensations.” They’re working together on a Scentee app that integrates with other apps to add smells to various smartphone functions. For example, the app could link to your morning alarm to get the day started with the smell of coffee, or could add fragrances to texts so that messages from different friends come with distinct aromas.
But Karunanayaka’s team wanted to find an alternative to chemical devices with cartridges that require refilling. They wanted to send smells with electricity alone.
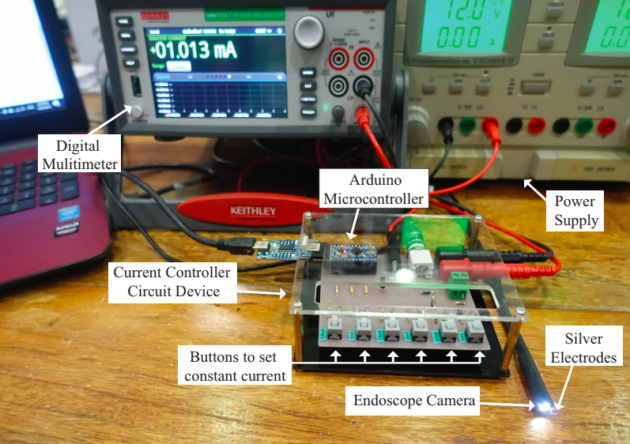
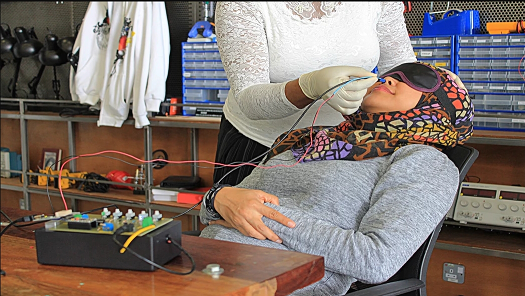
For his experiments, he convinced 31 volunteers to let him stick a thin and flexible cable up their noses. The cable was tipped with both a tiny camera and silver electrodes at its tip. The camera helped researchers navigate the nasal passages, enabling them to bring the electrodes into contact with olfactory epithelium cells that lie about 7 centimeters above and behind the nostrils. These cells send information up the olfactory nerve to the brain.
Typically, these olfactory cells are stimulated by chemical compounds that bind to cell receptors. Instead, Karunanayaka’s team zapped them with an electric current.
The researchers had previously combed the scientific literature [PDF] for examples of electrical stimulation of nasal cells, and found some reports that the stimulation caused test subjects to perceive odors. So they decided to experiment with different parameters of stimulation, altering both the amount and frequency of the current, until they found the settings that most reliably produced smell sensations.
The subjects most often perceived odors they described as fragrant or chemical. Some people also reported smells that they described as fruity, sweet, toasted minty, or woody.
This experiment was a very basic proof-of-concept, Karunanayaka says. The next step is to determine whether certain stimulation parameters are reliably linked to certain smells. He must also investigate how much variability there is between subjects. “There may be differences due to age, gender, and human anatomy,” he says.
The biggest question, however, is whether he can find a way to produce these ghostly aromas without sticking a tube up people’s noses. The experiments were very uncomfortable for most of the volunteers, Karunanayaka admits: “A lot of people wanted to participate, but after one trial they left, because they couldn’t bear it.”

Two possible solutions suggest themselves, Karunanayaka says: They could make the insert smaller, more flexible, and less unbearable. Or they could skip past the nose’s olfactory cells and directly stimulate the brain.
As a step toward that neurotech goal, the Imagineering Institute researchers are planning a brain-scanning collaboration with Thomas Hummel, a leading expert in smell disorders at the Technische Universität Dresden in Germany. In the planned experiment, volunteers will both smell real odiferous objects, such as a rose, and also receive nasal stimulation. All these sniffs will take place while the volunteers are getting their brains scanned by a noninvasive method such as fMRI.
“We’ll see which areas in the brain are activated in each condition, and then compare the two patterns of activity,” Karunanayaka says. “Are they activating the same areas of the brain?” If so, that brain region could become the target for future research. Maybe the researchers could use a headset that provides a noninvasive form of stimulation to trigger that brain region, thus producing smell sensations without the need for either a rose or a nose-cable.
Such tech could serve a restorative purpose: People with smell disorders could theoretically wear some headgear to regain some smell functions. And for people with intact sniffer systems, it could provide enhancements: For example, VR headset makers could build in the brain-stimulating tech to provide users with a more immersive and richer sensory experience.